

















OFF
ClickID

18 g
Status:
LSM6DSL click measures linear and angular velocity with six degrees of freedom. It carries the LSM6DSL high-performance 3-axis digital accelerometer and 3-axis digital gyroscope. The click is designed to run on a 3.3V power supply. LSM6DSL click communicates with the target microcontroller over SPI or I2C interface, with additional functionality provided by the INT pin on the mikroBUS™ line.
This product is no longer in stock
Availability date: 11/09/2023
LSM6DSL click measures linear and angular velocity with six degrees of freedom. It carries the LSM6DSL high-performance 3-axis digital accelerometer and 3-axis digital gyroscope. The click is designed to run on a 3.3V power supply. LSM6DSL click communicates with the target microcontroller over SPI or I2C interface, with additional functionality provided by the INT pin on the mikroBUS™ line.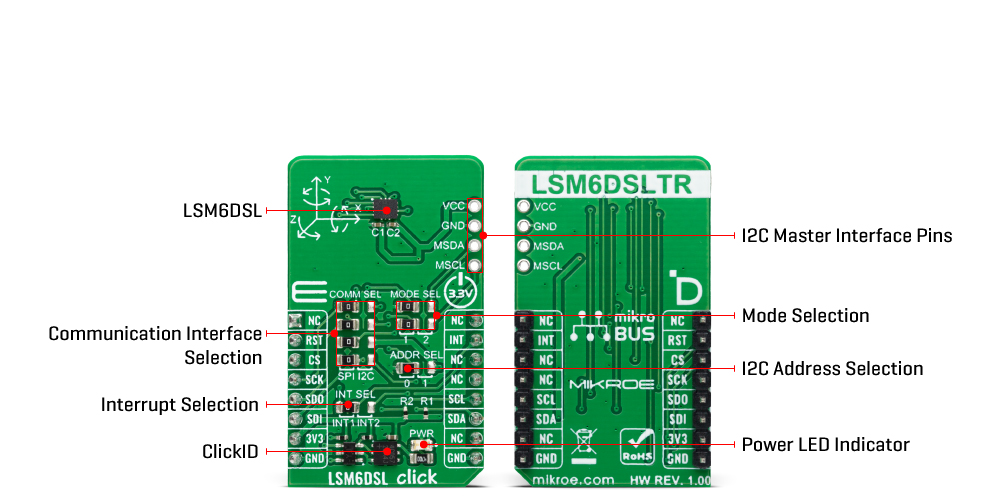
Mode 1: I2C slave interface or SPI serial interface is available.
Mode 2: I2C slave interface, or SPI serial interface and I2C interface master for external sensor connections, are available.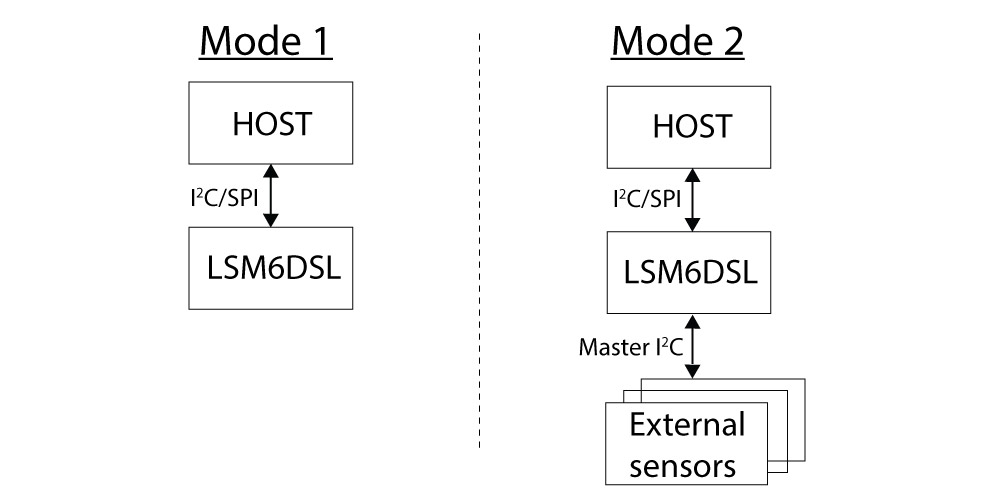
The LSM6DSL is a system-in-package featuring a 3D digital accelerometer and a 3D digital gyroscope performing at 0.65 mA in high-performance mode and enabling always-on low-power features for an optimal motion experience.
The event-detection interrupts enable efficient and reliable motion tracking and contextual awareness, implementing hardware recognition of free-fall events, 6D orientation, click and double-click sensing, activity or inactivity, and wakeup events
The LSM6DSL has a full-scale acceleration range of ±2/±4/±8/±16 g and an angular rate range of ±125/±245/±500/±1000/±2000 dps (degrees per second).
Type
Motion
Applications
Motion tracking and gesture detection, indoor navigation, vibration monitoring and compensation, etc.
On-board modules
LSM6DSL
Key Features
Power consumption: 0.4 mA in combo normal and 0.65 mA in combo high-performance mode; hard, soft ironing for external magnetic sensor corrections
Interface
I2C,SPI
ClickID
Manifest,No
Compatibility
mikroBUS™
Click board size
M (42.9 x 25.4 mm)
Input Voltage
3.3V
This table shows how the pinout on LSM6DSL click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | NC | ||
| NC | 2 | RST | INT | 15 | INT | Programmable interrupt | |
| Chip select | CS | 3 | CS | TX | 14 | NC | |
| SPI clock | SCK | 4 | SCK | RX | 13 | NC | |
| Master input slave output | MISO | 5 | MISO | SCL | 12 | SCL | I2C clock |
| Master output slave input | MOSI | 6 | MOSI | SDA | 11 | SDA | I2C data |
| Power supply | +3.3V | 7 | 3.3V | 5V | 10 | NC | |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
| Designator | Name | Default Position | Default Option | Description |
|---|---|---|---|---|
| JP1 | COMM SEL | Left | SPI | Communication Interface Selection SPI/I2C, left position SPI, right position I2C |
| JP2 | COMM SEL | Left | SPI | Communication Interface Selection SPI/I2C, left position SPI, right position I2C |
| JP3 | COMM SEL | Left | SPI | Communication Interface Selection SPI/I2C, left position SPI, right position I2C |
| JP4 | INT SEL | Left | INT1 | Interrupt selection INT1/INT2, left position INT1, right position INT2 |
| JP5 | COMM SEL | Left | SPI | Communication Interface Selection SPI/I2C, left position SPI, right position I2C |
| JP6 | MODE SEL | Left | 1 | Mode Selection 1/2, left position 1, right position 2 |
| JP7 | MODE SEL | Left | 1 | Mode Selection 1/2, left position 1, right position 2 |
| JP8 | ADD SEL | Left | 0 | I2C slave address selection 0/1, left position 0, right position 1 |
Code examples for LSM6DSL click, written for MikroElektronika hardware and compilers are available on Libstock.
The following code snippet initializes the module, the driver, and peripherals, and then outputs the measured data to UART every two seconds.
01 void main() 02 { 03 char txt [100]; 04 float x,y,z; 05 06 systemInit(); 07 LSM6DSL_initDriver(SPI3_Write, SPI3_Read); 08 UART1_Write_Text ("rnInitialized"); 09 10 /* 11 * Starts measurements for acceleration and rotation at specified 12 * rate (104 HZ) and selected full-scale (+-2G, +-245DPS). 13 */ 14 LSM6DSL_configureRead (CONFIG_ACCELERATION, ODR_104_HZ | FULLSCALE_A_2); 15 LSM6DSL_configureRead (CONFIG_ROTATION, ODR_104_HZ | FULLSCALE_R_245); 16 while( 1 ) 17 { 18 UART1_Write_Text ("rnrnAcceleration values in mili-Gs:"); 19 LSM6DSL_readAccelerationXYZ (&x, &y, &z, FULLSCALE_A_2); 20 sprintf (txt, "rnX: %.2f, t Y:%.2f, t Z: %.2f", x,y,z); 21 Uart1_Write_Text (txt); 22 23 UART1_Write_Text ("rnRotation values in degrees per second:"); 24 LSM6DSL_readRotationXYZ (&x, &y, &z, FULLSCALE_R_245); 25 //Values are read in mili-degrees per second, so they need to be divided by 1000 26 sprintf (txt, 27 "rnPitch: %.2f, t Roll:%.2f, t Yaw: %.2f", x/1000,y/1000,z/1000); 28 Uart1_Write_Text (txt); 29 30 delay_ms (2000); 31 } 32 }
NOTE: Please be advised that any peripheral devices or accessories shown connected to the Click board™ are not included in the package. Check their availability in our shop or in the YMAN section below.

$889.00

$79.00

$449.00

$299.00

$29.00

$29.00

$5.49

$3.00

$99.00

$349.00

$349.00

$349.00

$299.00

$449.00

$269.00

$249.00

$209.00
